Share
The most frequent reason for UAVs crashing during magnetic surveys is collisions with trees. Alexey Dobrovolskiy offers a workflow that can help stop that
UAV mission planning for magnetic surveys typical for exploration geophysics/minerals prospecting is noticeably different from another large class of magnetic surveys that detect small/artificial objects such as UXO (unexploded ordnance), utilities and archaeological items, requiring extremely low altitudes (starting from a few dozens of centimetres) and usually using UAVs capable of following terrain using radar or laser altimeters.
Magnetic surveys for geophysics/minerals prospecting usually have a flight altitude of a few dozen metres above the ground and are very often conducted over forested areas in rough terrain. There are a few key factors for successful magnetic data collection:
Elevation of the sensor (UAV) above ground level should be more or less the same.
The flight altitude should be as low as possible to collect high-resolution data but high enough to not crash the UAV into tall trees.
The trajectory should be as smooth as possible. This is paramount for magnetometers on suspension ropes: vertical manoeuvres or changes in the flight speed on survey lines may cause pendulum motion of the sensor ruining the collected data.
To plan UAV magnetometer missions in accordance with the above requirements, we need two kinds of elevation data: DTM (digital terrain model – bare ground) and DSM (digital surface model – including trees and vegetation, buildings, etc). Initially, the trajectory should be planned with a constant height above ground level using a DTM; after that, a DSM should be used to check the safety of the route.
Historically, satellite-derived elevation data was used to plan UAV magnetic surveys. There are many sources of satellite DTM and DSM datasets available, both free (for example, SRTM and Arctic DEM) and commercial (Airbus WorldDEM and others). Sometimes, these data sets are good enough, but they lack precision and resolution of DTM, especially in heavily forested areas and rough terrain. In addition, individual tall trees are usually not visible in satellite DSM data. These two factors have undesirable outcomes: the most frequent reason for UAV crashes during magnetic surveys is them hitting the trees.
LiDAR saves the mission
The solution to the problem of obtaining high-resolution and precise DSM/DTM data before conducting a magnetic survey comes with LIDAR. In the past two years, these sensors have become inexpensive and popular. They allow you to collect point cloud data with both bare ground and vegetation/obstacles for a square kilometre in a matter of minutes. The task is simplified by the fact that for mission planning, we don’t need a highly precise point cloud, as we would in the case of infrastructure/buildings inspection projects where we need the LIDAR data to have a precision of better than 5cm – a precision of about half a metre is more than enough. That means that we may use simplified workflows and do “quick and dirty” processing when we do stripes alignment, generating DTM and DSM.
The basic workflow will be as follows:
1. Collect LIDAR data over the area of subsequent magnetic surveys
As we do not need a very dense point cloud of the bare ground, in our experience flying at an altitude of 120m with the maximum speed of the UAV equipped with a medium-class LIDAR sensor, we will have at least a few points per square metre on the ground, even in a very dense tropical forest. Do not spend too much time on strip alignment and point cloud filtering/refinement. Remember that we do not need high data precision: 0.5m is more than enough.
2. Estimate the average/maximum height of the vegetation
We can use this to select a safe altitude for the UAV flight.
3. Classify ground points
That is the standard step before we can generate DTM data from the point cloud.
4. Generate a DTM from the ground points
A resolution of 1-2m for the DTM will be more than enough.
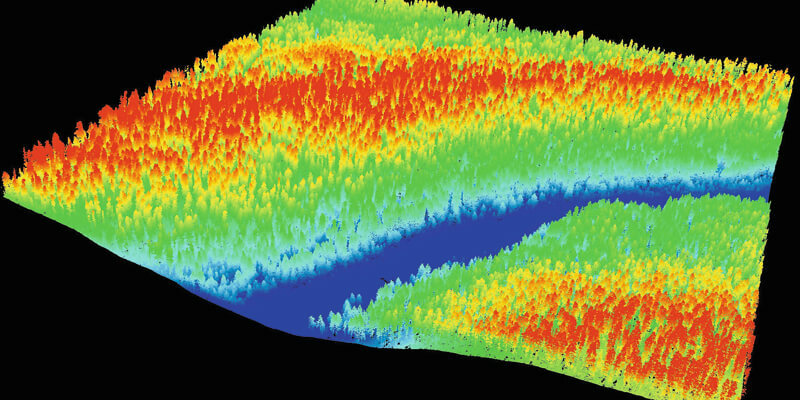
5. Generate a DSM
Here, you may select a better resolution – say, 0.25m-0.5m. The generated DSM may be huge, but even the tips of the trees will be visible.
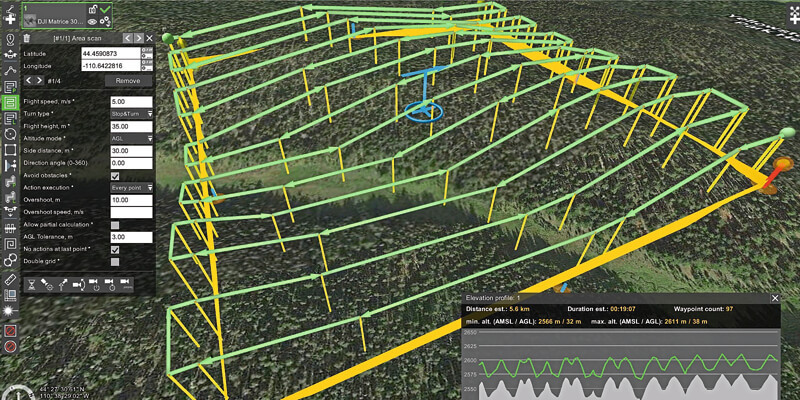
6. Import the DTM into the flight planning software
You can then plan a survey grid, specifying the flight altitude relative to DTM. Here you may play with the altitude tolerance parameter of the survey grid, balancing the terrain-following precision with the flight smoothness.
7. Convert the survey grid into separate waypoints
Fix the absolute altitude of waypoints, changing the altitude type from above ground level to above mean sea level.
8. Import the DSM and set its priority above the DTM
The flight planning software will warn you about waypoints where the altitude relative to the DSM is too low. The software will also try to increase the altitude of flight in places where it is too low, inserting additional waypoints. You may notice these locations visually or on the list of warnings.
What should you do if you get warnings or if the flight planning software inserts too many additional waypoints to “jump” over trees/obstacles? There are two options:
You may return to step 6 and increase the flight altitude, at the expense of resolution/quality of magnetic data for the entire survey.
You may manually edit the flight plan increasing altitude for the individual waypoint/segments.
If vegetation in the survey area is too tall or there are too many trees with high canopies, there are no simple recommendations that are ideal for all cases. You will need to balance quality, safety and survey time, based on your mission’s objectives.
However, the approach described above will help you to collect data that is good enough in most cases – while avoiding crashing your very expensive equipment into the trees.
Alexey Dobrovolskiy is chief technical officer, member of the board and co-founder at SPH Engineering (www.sph-engineering.com)