Share
The following article explains how traditional GNSS-based navigation, while essential for surface mining, fails underground due to signal blockage, interference, and atmospheric disruptions, creating a major challenge for modern digital mining operations. Inertial Navigation Systems (INS) provide a strong foundation for underground navigation because they operate independently of external signals and deliver high-rate, full 6DoF motion data, but they still suffer from drift over time.
To overcome this, Advanced Navigation developed a hybrid system combining its Boreas D90 fibre-optic INS with the Chimera laser-based velocity sensor, which uses Doppler-shifted infrared lasers to precisely measure ground-relative velocity and continuously correct inertial drift through adaptive sensor fusion software. The system was validated in Finland’s GNSS-denied Callio Mine, achieving extremely low position errors over multiple underground runs, including half-marathon-scale distances, without relying on mine maps or installed infrastructure, demonstrating that inertial-first multi-sensor navigation could enable reliable autonomy, tracking, and safety systems in challenging underground environments.

For decades, the mining industry has depended on Global Navigation Satellite Systems (GNSS), such as GPS, for fleet tracking, machine guidance, and asset management. By triangulating signals from satellites, GNSS enables high-accuracy positioning across surface and open-pit operations, forming the backbone of today’s digital mine.
But when you go underground, GNSS stops working. Beneath rock and overburden, there’s no line of sight to satellites. Even open pits can lose accuracy near steep walls or large structures due to multipath interference, where signals bounce and distort.
Beyond geometric limitations, GNSS is also vulnerable to ionospheric scintillation which are rapid fluctuations in the ionosphere that disrupt satellite signals. Mild scintillation can degrade positional accuracy, while more severe disturbances can result in complete signal loss. These effects are particularly pronounced at equatorial and high-latitude regions.
The Underground Challenge
Underground mines present some of the harshest environments for navigation. Dust, darkness, tight geometry, and ever-changing headings make most conventional solutions unreliable.
Legacy approaches to underground positioning have included infrastructure-heavy solutions such as ultra-wideband beacons, Wi-Fi, 5G repeaters, or perception-based techniques such as SLAM (Simultaneous Localisation and Mapping) which require cameras. These methods are costly to integrate and maintain, slow to install, and often unavailable in hazardous or unmapped zones where reliable navigation is most critical.
Inertial Solutions: Reliable Navigation Without External Signals
The mining industry is trending towards the adoption of Inertial Navigation Systems (INS). An INS measures motion through accelerometers and gyroscopes, integrating these readings to compute position, velocity, and orientation relative to a known starting point. This process is known as dead reckoning.
When mounted on a mining vehicle, an INS offers several critical advantages:
● High update rates: INS data refreshes at far higher frequencies than GNSS, providing continuous motion and orientation feedback essential for autonomous control and high-precision guidance.
● Comprehensive attitude data: Unlike GNSS, which offers position alone, an INS supplies full six-degrees-of-freedom (6DoF) data (roll, pitch, yaw, and position), critical for precision machine control.
● Operation in GNSS-degraded and GNSS-denied conditions: INS performance is resilient to dust, low light, and signal occlusion, ensuring uninterrupted navigation even in underground headings or adverse weather.
When fused with GNSS, an integrated GNSS/INS solution reinforces the absolute positioning from GNSS with high-rate inertial data to smooth and validate motion estimates. This data fusion provides operators with a more complete picture of equipment behaviour. For instance, on a dozer, INS units can measure blade pitch, roll, and depth in real time while GNSS defines the machine’s absolute position. Together, these datasets support centimetre-level precision grading, reducing rework and improving material yield.

Beyond GNSS: A Hybrid, Multi-Sensor Navigation Approach
However, even the most advanced INS isn’t perfect. Over time, tiny, unavoidable measurement errors accumulate, causing the calculated position to 'drift' from the true position.
That’s why the next generation of mining navigation lies in hybrid or layered architectures, systems where inertial navigation forms the central processing layer, augmented by data from auxiliary sensors that enhance reliability and reduce drift.
Unlike GNSS, which can be obstructed or spoofed, inertial navigation is entirely self-contained. When fused with other modalities such as laser velocity sensing or odometry, a hybrid system can sustain precise positioning over long durations without GNSS or local infrastructure.
Advanced Navigation has demonstrated this approach. Through the integration of its Boreas D90 fibre-optic gyroscope (FOG)-based INS with the Chimera laser-based velocity sensor, the team created a fully hybrid navigation architecture.

The Boreas INS employs ultra-sensitive FOG technology to detect Earth’s rotation, enabling gyrocompassing, a process that determines true North and heading independent of magnetic or satellite input. This makes it inherently robust in magnetically distorted or GNSS-denied environments.
To further enhance accuracy, the Boreas INS is fused with Chimera, which uses infrared laser beams to continuously measure a vehicle’s three-dimensional velocity relative to the ground. It exploits the relativistic Doppler effect to estimate velocity with extraordinary precision. The principle is straightforward: when a laser beam is reflected from a surface, its frequency shifts in proportion to the velocity of the sensor relative to that surface. This data provides a constant corrective reference, mitigating the gradual drift that naturally accumulates in standalone inertial systems.
Integration and sensor fusion are handled by Advanced Navigation’s proprietary software framework. Using adaptive algorithms, it dynamically assigns confidence weightings to each sensor input, optimising accuracy in real time. The result is a resilient, self-sufficient navigation solution capable of delivering uninterrupted positional data without a constant reliance on GNSS or fixed infrastructure.
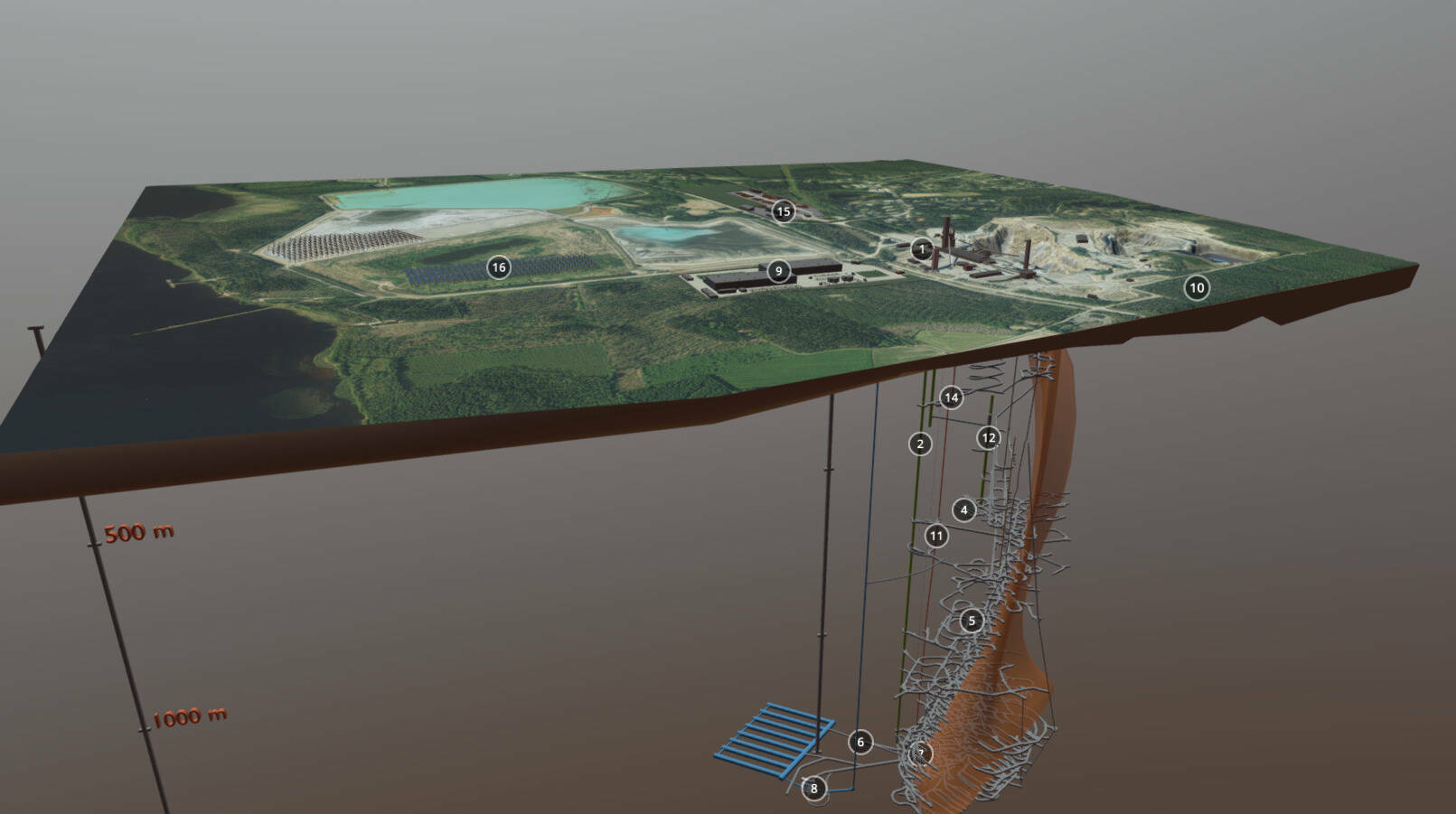
Demonstration in Europe’s Deepest Mine
This hybrid system was successfully validated at the Callio Mine in Pyhäjärvi, Finland, Europe’s deepest mine. Located 1.4 km underground with a 63 degree latitude (just two degrees below the Arctic Circle), the underground mine is completely impervious to GNSS signals. Its repetitive, multi-level tunnel network creates a high risk of visual disorientation, while its metallic ores distort magnetic fields and scatter radio waves.
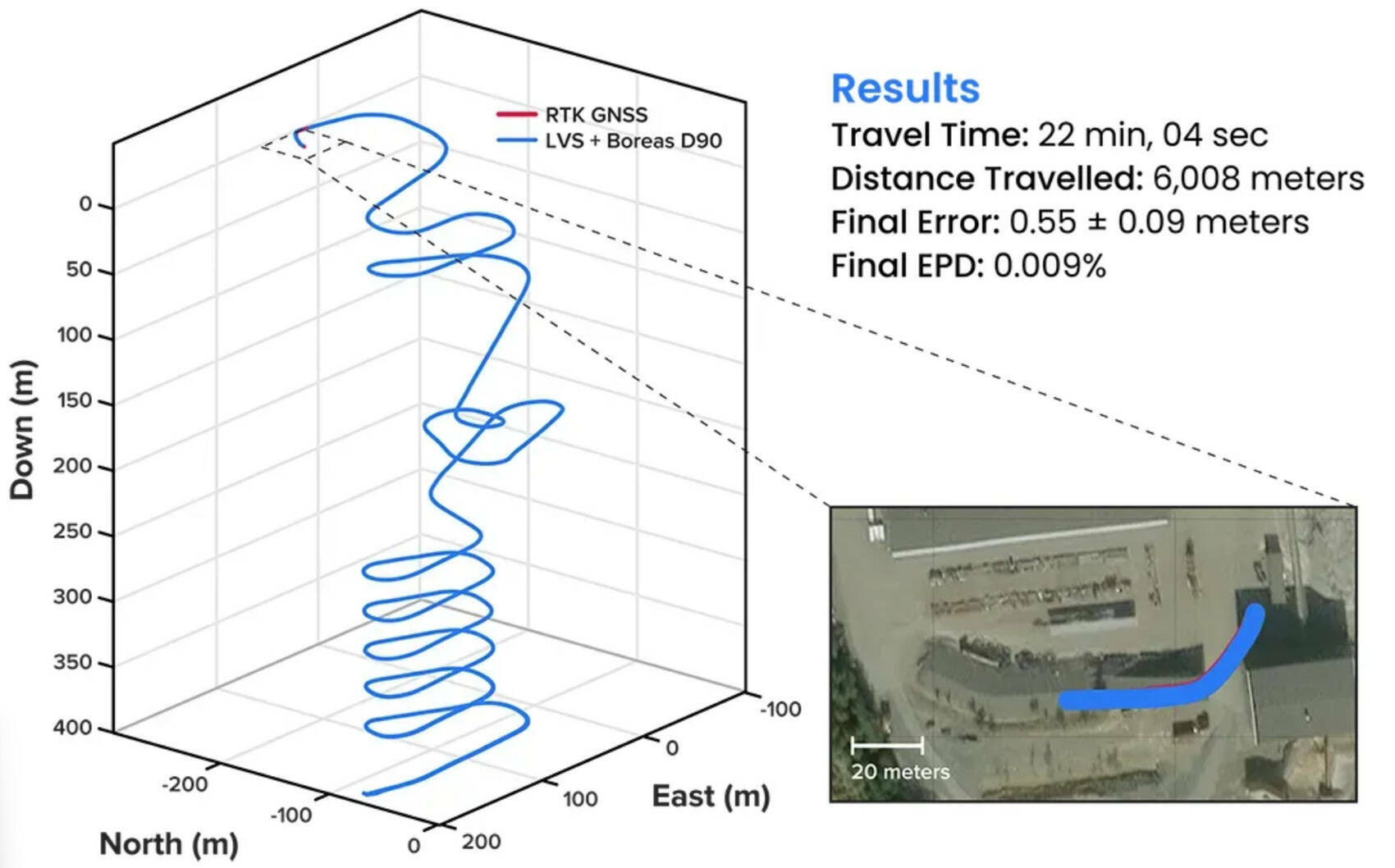
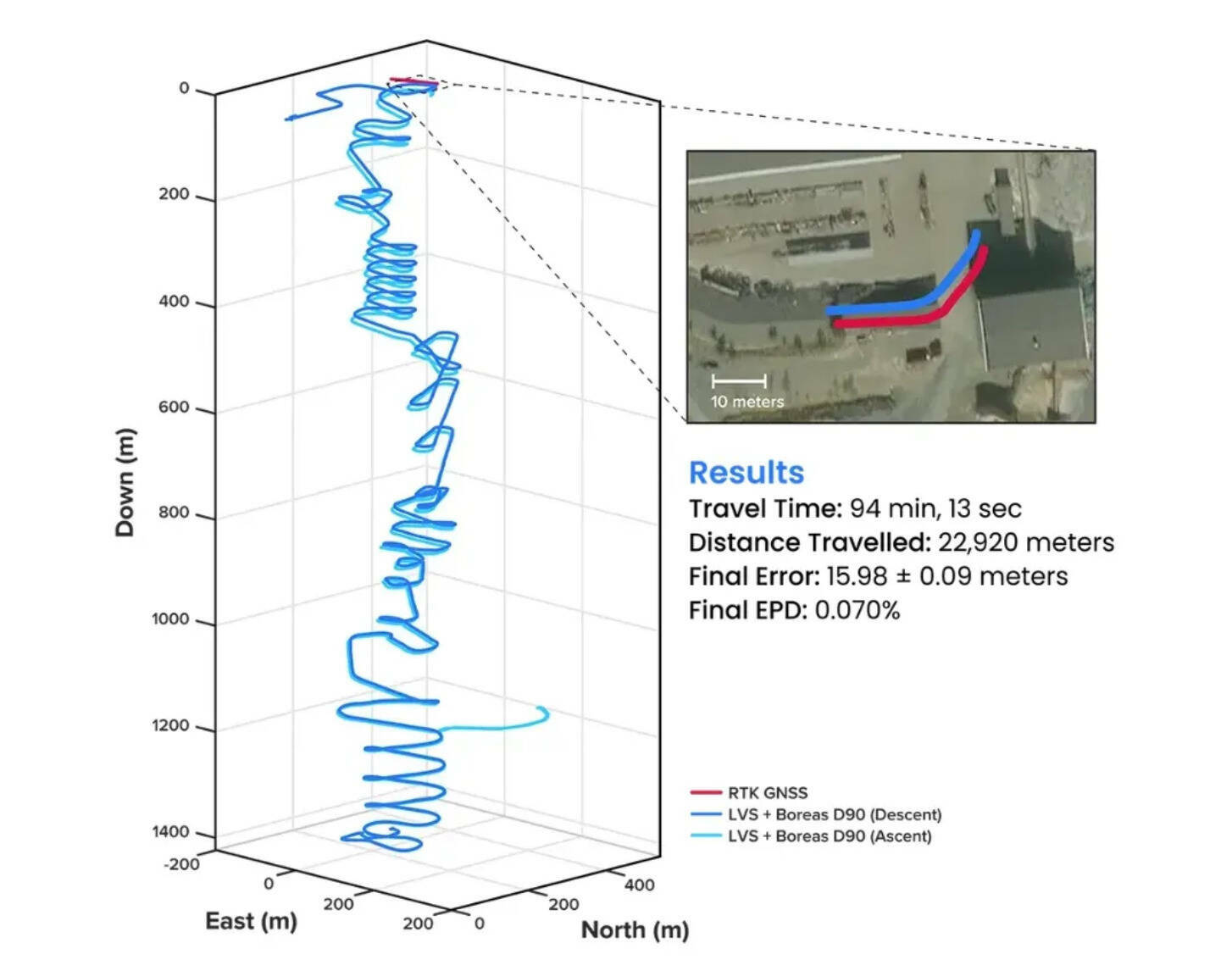
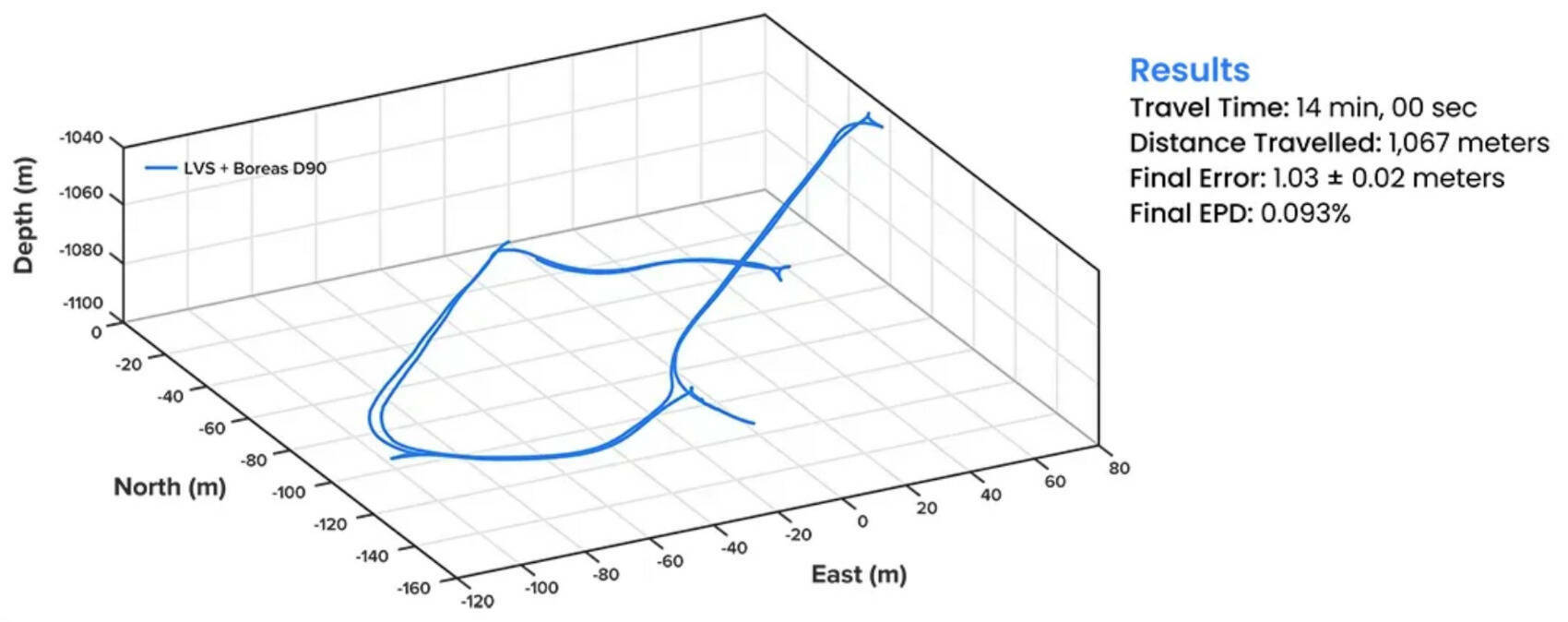
Across multiple tests, including a 22.920 km run at ~1400 m depth, the hybrid system achieved well below the goal of a sub-0.1% position error rate over the distance travelled. In one trial, it achieved a final error of 0.55 ±0.09 metres over 6008 metres (0.0091%), exceeding the benchmark by more than an order of magnitude. A fully underground initialisation and traverse resulted in 1.03 ±0.02 metre error over 1067 metres (0.093%).
All tests were performed without prior knowledge of the mine layout, or the use of any existing infrastructure.
Runs 1, 2 and 3: Accuracy Surpassing Surface-Level GNSS
Over a 6 km rough and rugged terrain that extended 400 metres below the surface, the system achieved a best-case 3D position error of just 0.55 metres (0.009%), with an average error of 2.83 metres (0.047%). For context, standard single-band GNSS on the surface typically delivers 2–10 metre accuracy in open-sky conditions. This system delivered significantly greater precision even within a subterranean labyrinth.
Run 4: Maintaining Precision Over a Half-Marathon Underground
The system navigated a 22.9 km route to a depth of 1,400 metres, the equivalent of a half-marathon in total darkness. The final position error was 15.9 metres (0.07%), showcasing its immunity to the drift that plagues other inertial systems.
Run 5: True “Anywhere, Anytime” Navigation
The graph below illustrates the ultimate test of self-reliance: a true north-seeking initialisation conducted 1.4 km underground. Without relying on magnetometers or external aids, the system determined direction (heading) using its built-in gyrocompassing procedure, measuring the Earth’s rotation to establish true North. It then navigated a 1 km course with just 1 metre of error, demonstrating its capability for deployment in the most challenging and unfamiliar terrain.
Unlocking Scalable Autonomy in Mining
In today’s dynamic operational environments, relying on a single navigation technology is no longer viable. Robust navigation demands a layered, inertial-first and multi-sensor architecture, held together by intelligent software that can adapt and scale to meet the unique demands of each operation.
While mines will continue to use fixed infrastructure, Advanced Navigation's inertial-centred hybrid architecture significantly reduces dependency, enabling resilient, high-precision navigation in previously inaccessible or unmapped areas. This performance marks a step change in underground navigation, unlocking new potential for fleet management, predictive collision avoidance, material tracking and scalable autonomy across mining operations.
Subscribe to our newsletter
Stay updated on the latest technology, innovation product arrivals and exciting offers to your inbox.
Newsletter